

In this course, David Vernon presents the 10th module of the "Design & Implementation of Cognition-enabled Robot Agents" series. The learning goals of this module enables you to:
- Describe the three paradigms of cognitive science
- Explain the characteristics of cognitive architecture in each of the three paradigms
- Describe the key components of a hybrid cognitive architecture
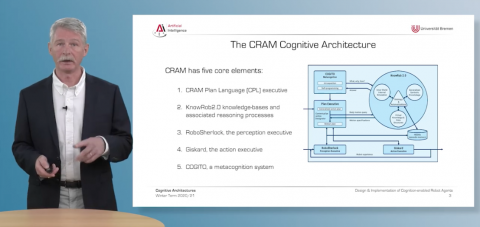
- Sketch the design of the ISAC and CRAM cognitive architectures and explain how they operate
In four lectures cognitive architectures are explained and how cognitive agents can use these architectures.
We acknowledge the support from the KI-Campus Projekt funded by the German Federal Ministry of Education and Research.
